





Las características de deslizamiento y de par motor son básicas para entender cómo un motor de inducción desarrolla el par y responde a las condiciones de funcionamiento cambiantes. Estas curvas muestran la relación entre el par, el deslizamiento y la velocidad del rotor desde el parque hasta el funcionamiento normal, la sobrecarga y otras regiones de operación. También ayudan a explicar el funcionamiento estable, el par máximo de motor, los efectos de resistencia del rotor y el uso de estas características en el análisis de motores.
Visión general sobre el deslizamiento de par y la velocidad de par
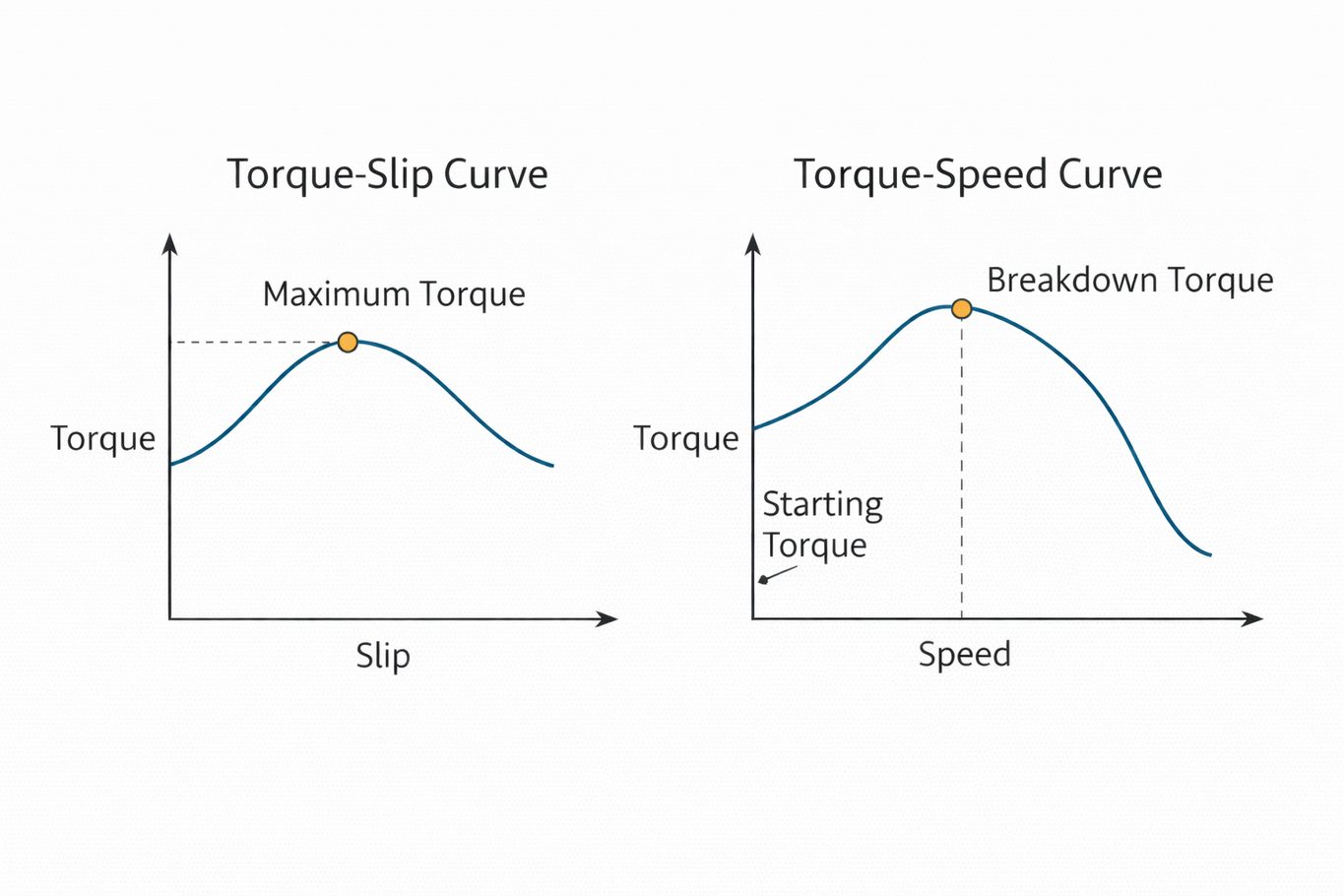
Las características de par deslizamiento y velocidad de par describen el mismo comportamiento electromagnético de un motor de inducción desde dos perspectivas.
La curva de par y deslizamiento muestra cómo varía el par con el deslizamiento, mientras que la curva de par y velocidad presenta la misma relación usando la velocidad del rotor en lugar del deslizamiento. Dado que la velocidad del rotor es directamente medible, la característica par-velocidad se utiliza más comúnmente en el análisis práctico.
Estas dos representaciones son intercambiables y proporcionan una base para comprender el rendimiento del motor bajo diferentes condiciones de funcionamiento.
El deslizamiento como base de la producción de par motor
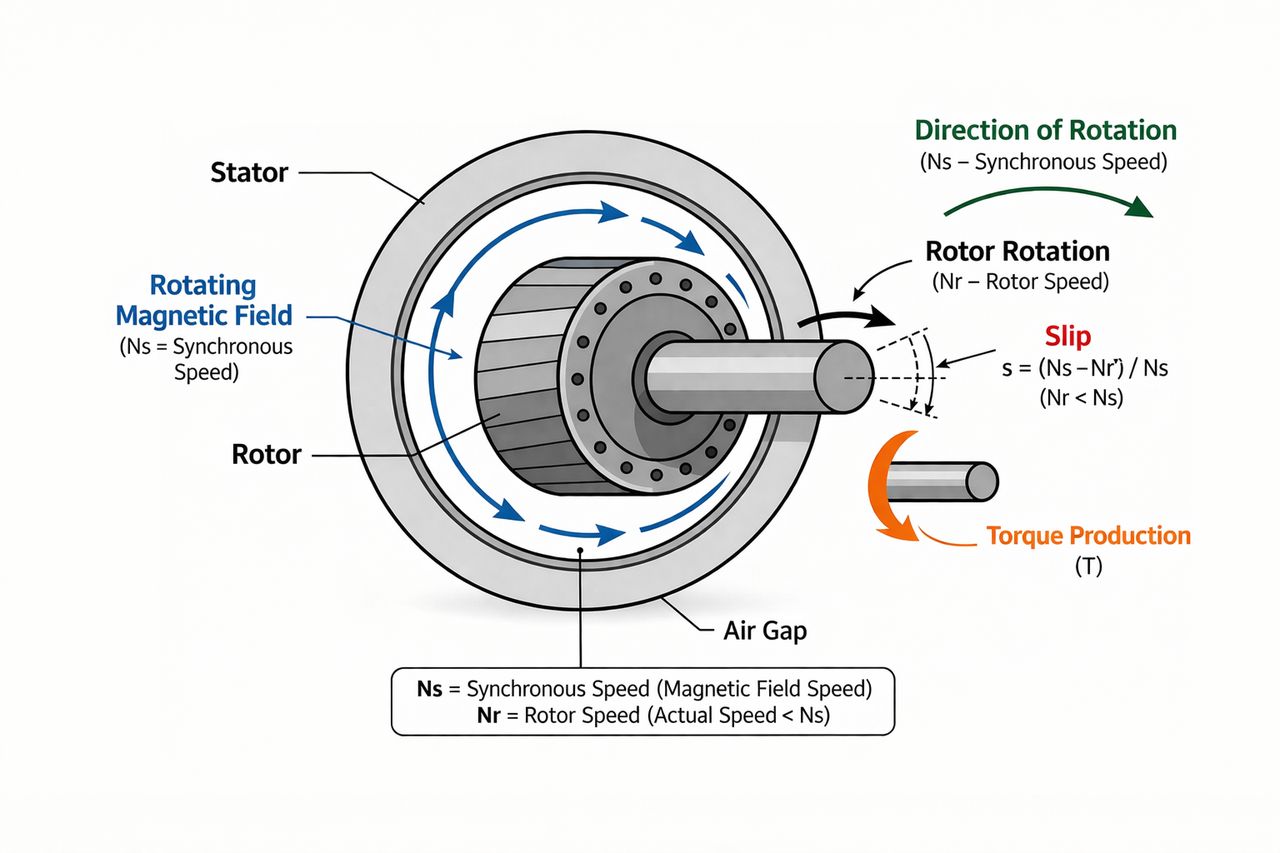
Un motor de inducción necesita un deslizamiento para producir par. El deslizamiento crea un movimiento relativo entre el campo magnético giratorio y el rotor. Este movimiento induce la FEM del rotor y la corriente del rotor, que interactúan con el campo magnético para producir par.
Si el rotor alcanzaba la velocidad síncrona, no habría movimiento relativo. En esa condición, la FEM y la corriente del rotor desaparecerían, por lo que el motor no produciría par. Por eso un motor de inducción normalmente no funciona a velocidad síncrona exacta.
Cuando la carga mecánica aumenta, el rotor se ralentiza ligeramente. Esto aumenta el deslizamiento y permite que el motor desarrolle más par. De este modo, el deslizamiento permite que el motor responda automáticamente a los cambios de carga.
Lectura de la característica de deslizamiento de par motor
Región de Bajo Deslizamiento: Funcionamiento Estable
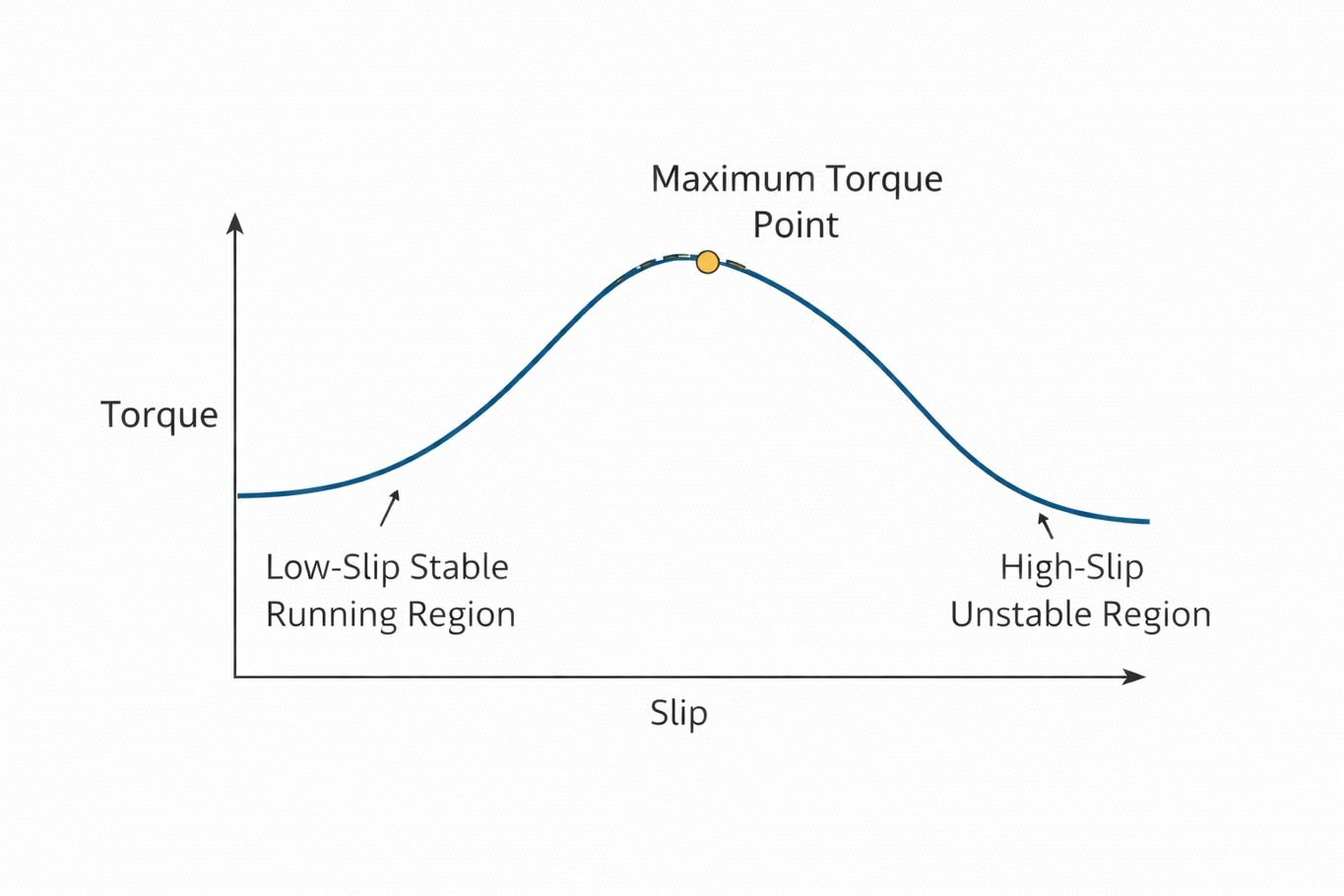
En la región de baja patinación, el motor funciona cerca de la velocidad síncrona. En esta parte de la curva, el par aumenta casi en proporción directa al deslizamiento. Cuando la carga aumenta ligeramente, el deslizamiento también aumenta ligeramente y el motor desarrolla más par.
Esta es la región normal de funcionamiento del motor de inducción. Es la parte estable de la curva, donde la velocidad se mantiene bastante constante y el par se ajusta suavemente según cambia la carga.
Región Media: Par máximo
A medida que el deslizamiento sigue aumentando, el par sube hasta alcanzar su valor máximo. Este pico se denomina par máximo de par, par de retirada o par de avería.
Este punto muestra el mayor par que el motor puede producir antes de que su velocidad disminuya de forma más brusca. Marca el límite superior de desarrollo estable de par. Cerca de este punto, el motor puede soportar una carga mayor durante un corto tiempo, pero no debería permanecer en esta condición por mucho tiempo.
La condición para el par máximo se escribe comúnmente como:
R₂ = sX₂₀
Región de alto deslizamiento: caída de par y riesgo de pérdida de combustible
Tras el punto máximo de par, un aumento adicional del deslizamiento hace que el par disminuya. Esta parte de la curva es inestable.
En esta región, el motor se ralentiza mientras pierde par. Si la carga se mantiene demasiado alta, el motor puede pararse. La corriente y la calefacción también aumentan rápidamente, por lo que el funcionamiento en este rango no es adecuado para un funcionamiento normal.
Variación de par con la velocidad del motor
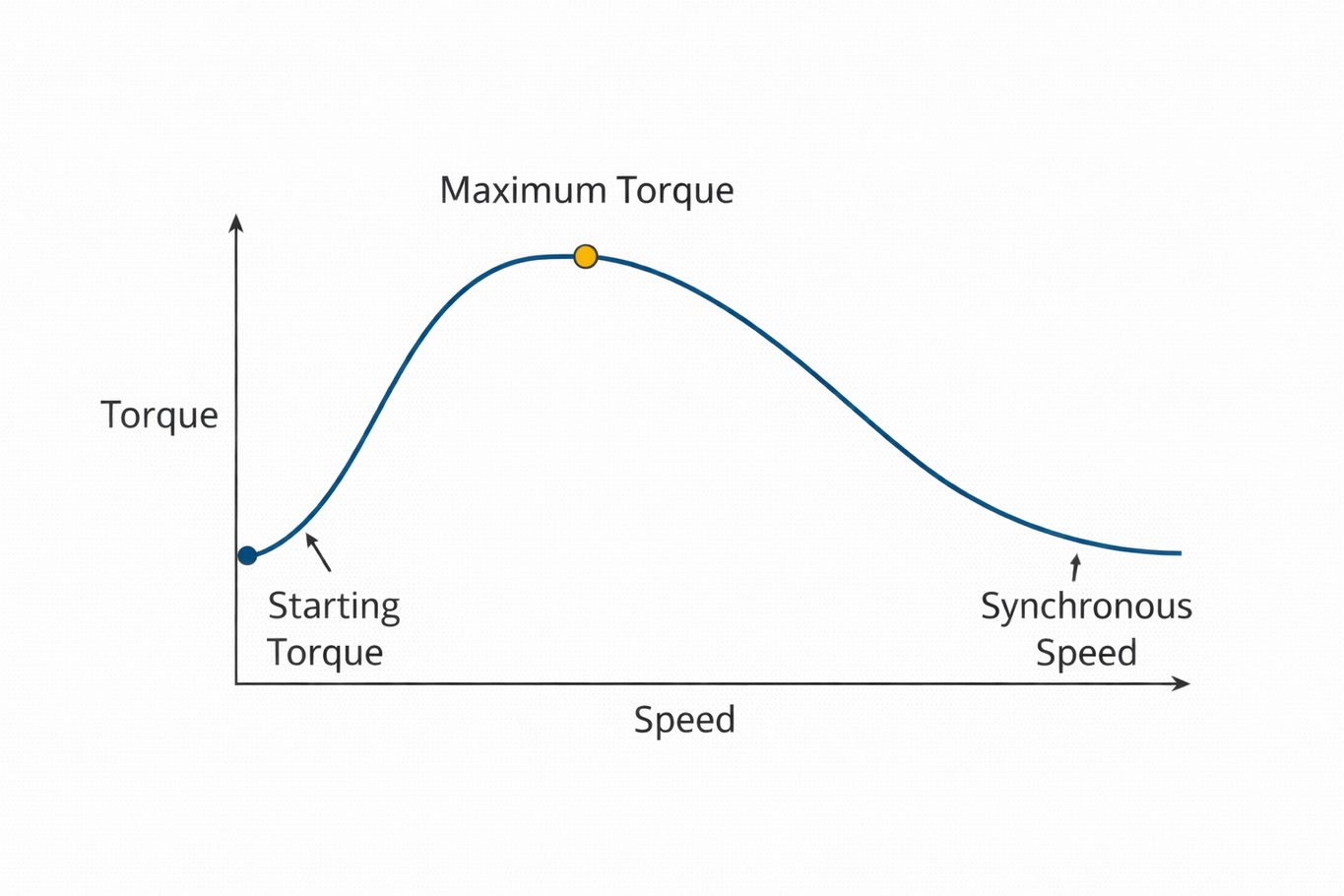
La característica par-velocidad muestra cómo cambia el par motor a medida que la velocidad del rotor aumenta de cero a casi sincrónica. En parada, la velocidad del rotor es cero y el deslizamiento es 1, por lo que el motor desarrolla el par inicial. A medida que el rotor acelera, el par aumenta hasta alcanzar el par máximo a una velocidad intermedia. A partir de este punto, el par motor disminuye a medida que la velocidad del rotor se acerca a la velocidad síncrona.
Esta curva proporciona una vista directa del comportamiento motor durante el arranque, la aceleración y el funcionamiento normal. Dado que la velocidad del rotor y el deslizamiento están relacionados, la velocidad al par máximo puede escribirse como:
Nm = Ns (1 − sm)
donde Nm es la velocidad del rotor al par máximo, Ns es la velocidad síncrona y sm es el deslizamiento al par máximo.
Puntos de par y funcionamiento estable
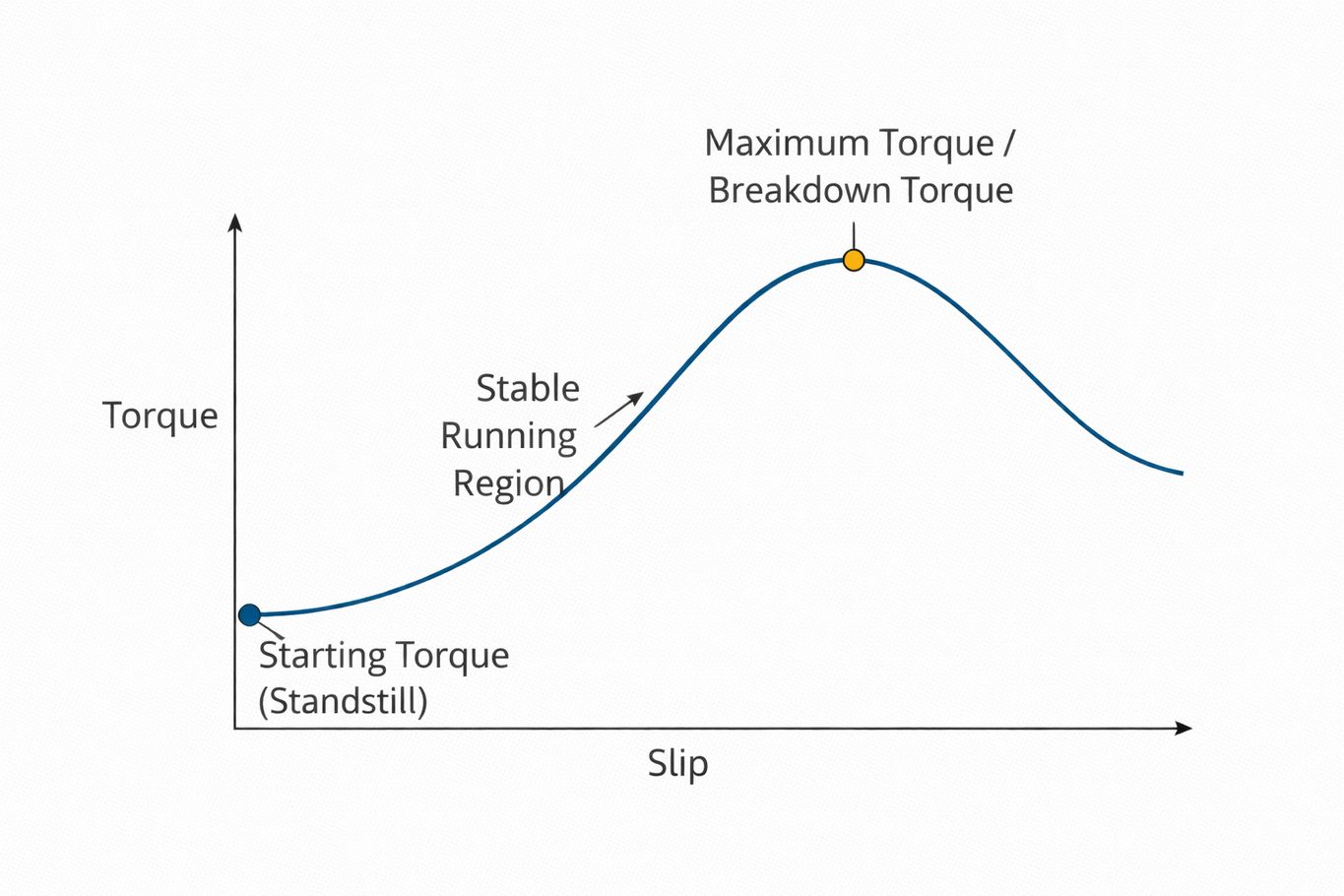
El par de arranque es el par producido cuando el motor está parado. Muestra cuánta fuerza de giro está disponible cuando el motor comienza a girar.
El par máximo es el par máximo que el motor puede desarrollar antes de que el par comience a disminuir. Marca el límite superior de par que el motor puede soportar mientras sigue funcionando correctamente.
El funcionamiento estable tiene lugar en la parte ascendente de la curva de par y deslizamiento, antes del punto máximo de par. En esta región, un aumento de la carga hace que el motor produzca más par, lo que ayuda a mantener el funcionamiento normal.
Para un funcionamiento normal, el motor debe funcionar muy por debajo del par de avería para mantenerse en un rango de funcionamiento estable.
Resistencia del rotor y desplazamiento de la curva
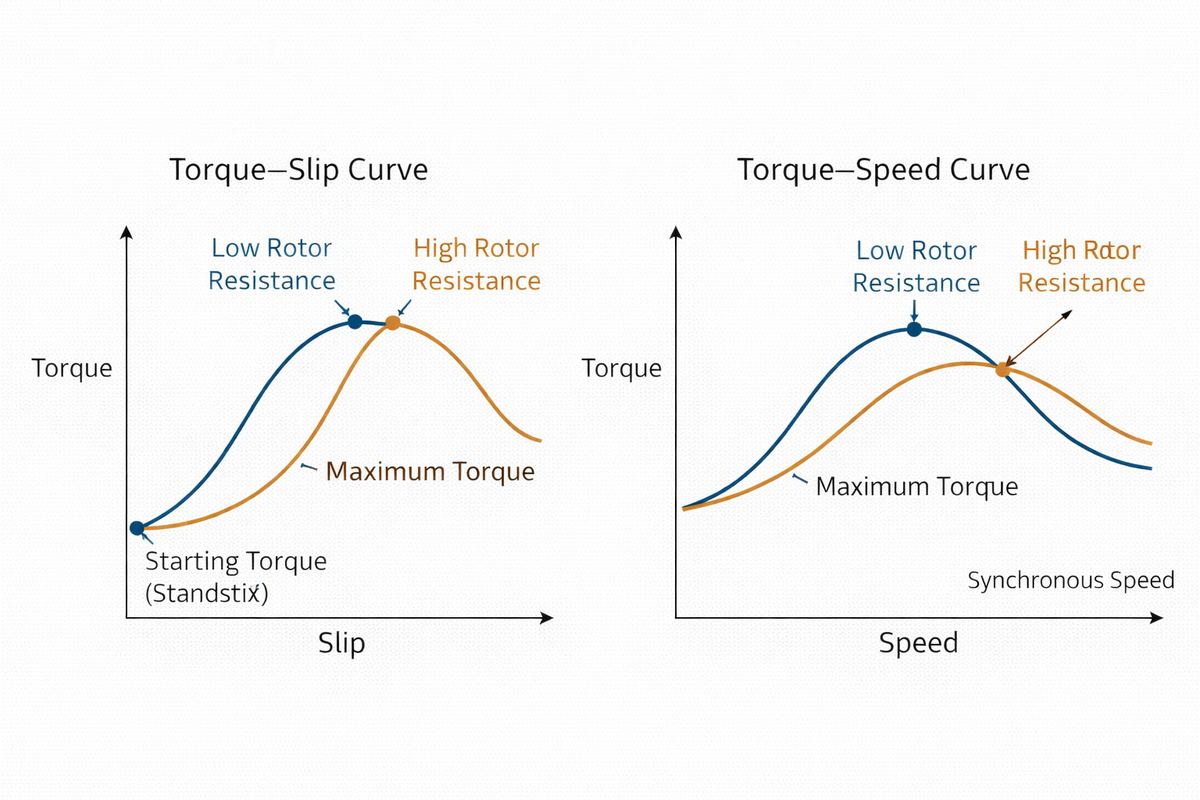
La resistencia del rotor cambia la posición del pico tanto en las curvas de par deslizamiento como en las curvas de par y velocidad. Cuando aumenta la resistencia del rotor, el deslizamiento al par máximo se vuelve mayor. Por ello, la velocidad al par máximo se vuelve menor. El pico se desplaza hacia un deslizamiento más alto y una velocidad más baja.
Un punto básico es que el valor del par máximo se mantiene casi igual. Lo que cambia es la ubicación de esa cima, no su altura.
Esto significa que el motor puede desarrollar un par fuerte a mayor deslizamiento, lo que mejora el comportamiento de arranque. Al mismo tiempo, el par máximo se alcanza a una velocidad más baja.
Regiones de operación de las curvas de par
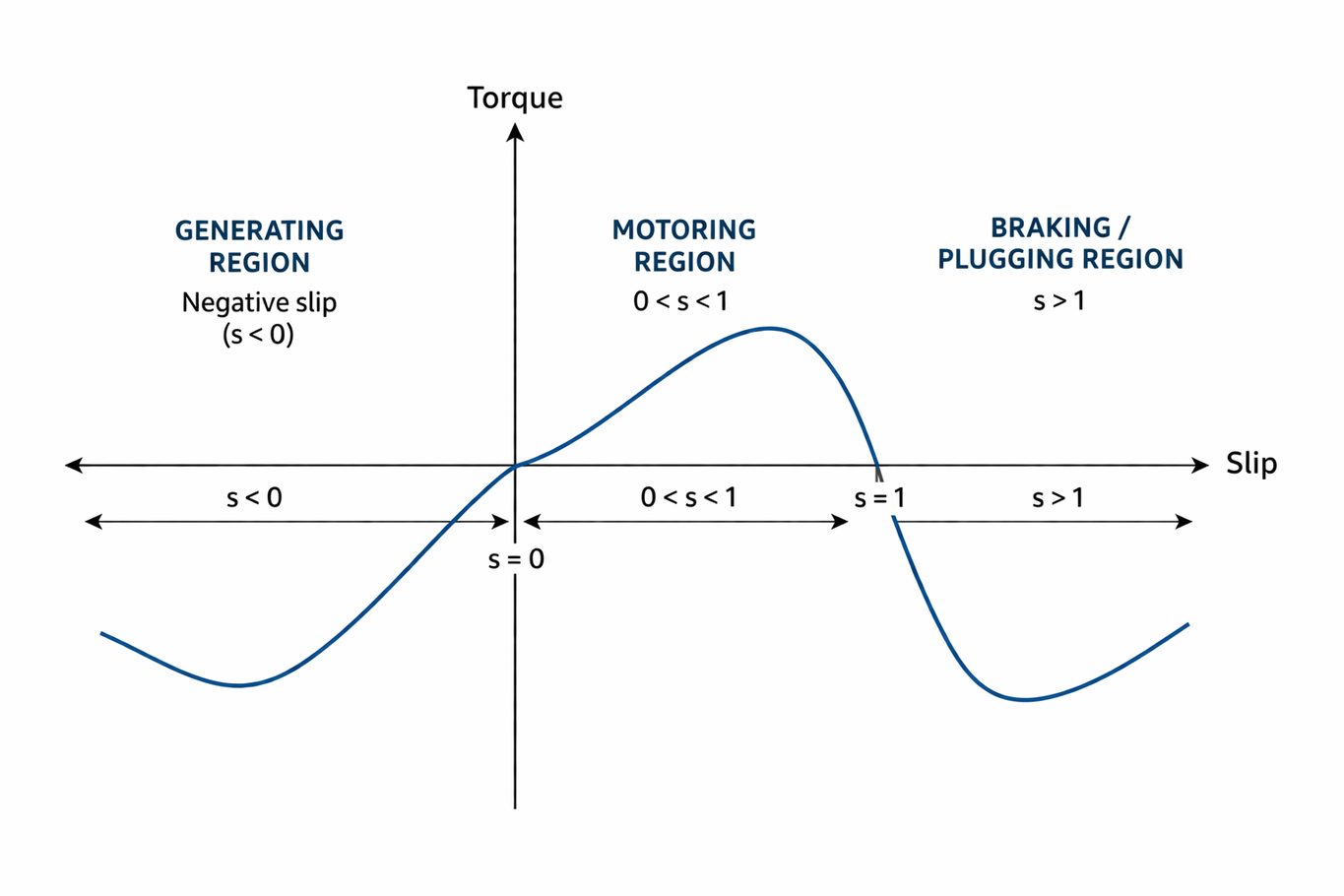
Región del motor
En la operación motorizada, el rotor funciona por debajo de la velocidad síncrona y produce una salida mecánica útil. Esta es la condición estándar de funcionamiento del motor de inducción.
Región generadora
Cuando el rotor se acciona por encima de la velocidad síncrona, la máquina funciona como un generador. En esta condición, la entrada mecánica se convierte en salida eléctrica.
Región de frenado
Cuando la máquina entra en la zona de frenado, el par desarrollado se opone a la rotación y ralentiza el motor. Un método es el tapping, que crea par inverso para frenar rápido. Esto también provoca un aumento del calentamiento porque la energía se libera en forma de calor.
Uso de características de deslizamiento de par y velocidad de par
• Prueba la capacidad inicial
• Muestra comportamiento de aceleración
• Ayuda a evaluar la estabilidad de la velocidad
• Identifica los límites de sobrecarga
• Ayuda a detectar el riesgo de pérdida de combustible
• Muestra el rendimiento durante las condiciones de frenado y generación
Pasos para leer curvas de par y de par y velocidad
• Identificar la velocidad síncrona
• Encontrar el par de arranque en parada
• Localizar la región normal de funcionamiento cerca de la velocidad síncrona
• Encontrar el punto de par máximo en la curva
• Comprueba si la carga requerida se mantiene en la región estable
• Revisar si la sobrecarga podría mover el motor hacia la región de par descendente
• Considerar el efecto de la resistencia del rotor en el arranque y la aceleración
Conclusión
Las características de par deslizamiento y de par motor proporcionan una forma clara de estudiar el rendimiento de los motores de inducción. Muestran cómo se produce el par, cómo cambia con el deslizamiento y la velocidad, dónde se produce un funcionamiento estable y qué ocurre cerca de sobrecarga o pérdida. También explican cómo la resistencia del rotor desplaza la curva y cómo se comporta el motor en las regiones de motorización, generación y frenado. Estas características son útiles para comprender, evaluar y leer correctamente el comportamiento motor.
Preguntas frecuentes [FAQ]
¿Qué moldea la curva de par y deslizamiento?
La resistencia del rotor, la reactancia del rotor y el voltaje de alimentación moldean la curva.
¿Cómo afecta el par de tensión más bajo?
Un voltaje más bajo reduce el par a lo largo de la curva.
¿La resistencia del rotor cambia el valor máximo de par?
No. Cambia la posición de par máximo.
¿Qué ocurre cuando el deslizamiento aumenta demasiado?
La eficiencia disminuye, la calefacción aumenta y el riesgo de pérdida aumenta.
¿Cómo afecta la frecuencia a la curva par-velocidad?
La frecuencia cambia la velocidad síncrona, así que la curva se desplaza.
¿Por qué se requiere la región estable?
Permite que el motor ajuste el par motor según cambia la carga y siga funcionando correctamente.









